This is contained in the file T4-llmR. Transfer Function from State Space Model.

Example State Space Analysis Youtube
A state-space model is commonly used for representing a linear time-invariant LTI system.
. Dynamics Linear Models in R. ARMA models in state space form AR2 model y t 1y t 1 2y t 2 e t e t NID0 2 Let x t y t y t 1 and w t e t 0. T t T ϕ 1 ϕ 2 1 0 R t R 1 0 η t ϵ t 1 N 0 σ 2 There are three unknown parameters in this model.
Diagram from the Dynamic Characteristics section of the Control Design palette. Often in the literature of State Space models the symbol x_t and theta_t are used interchangeably to refer to the state variable. Create indicator from the Pole-Zero Map and Poles outputs of the CD Pole-Zero Map VI so that you can view the poles on the front panel.
Each system equation has on its left side the derivative of a state variable and on the right side a linear combination of state variables and excitations. State space model. Its many applications include.
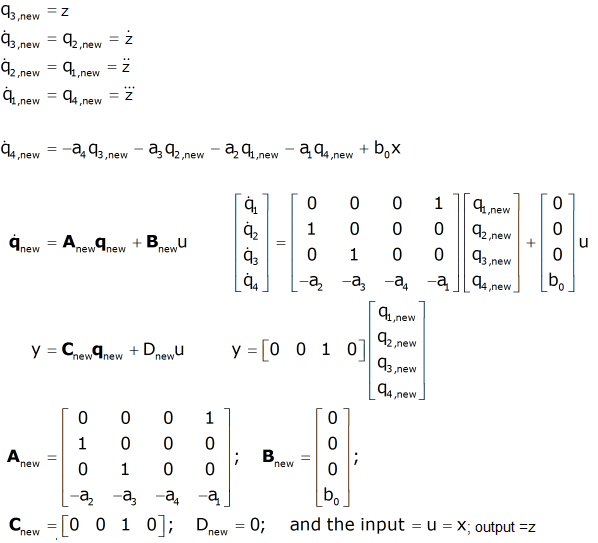
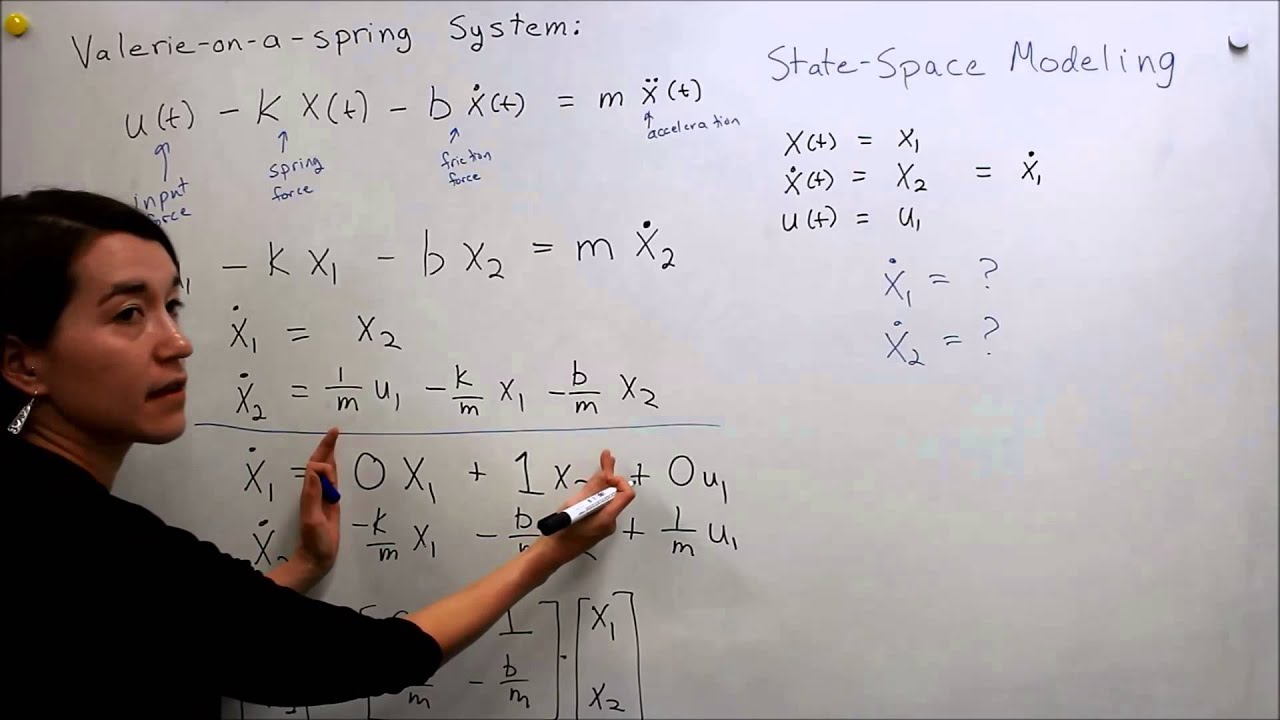
Sspace State-space models 7 Some stationary state-space models Example 1. Convert the Nth order differential equation that governs the dy namics into N first-order differential equations Classic example. Once again the first thing that we do is clear all variables from the current environment and.
U and Y are input vector and output vector respectively. Z t Z 1 0 and. AR MA and ARMA models in state-space form See SS Chapter 6 which emphasizes tting state-space models to data via the Kalman lter.
An equivalent formulation for a DLM is specified by the set of equations. Also conversions back to transfer fun. The first program for this session makes use of a local level model that is applied to the measure of the South African GDP deflator.
Set y 0 0 and V0 σ a2 1θ2 2φθ1φ2 θ θ θ2 σ2 a 1v0 θ θ θ2 where v. Yn CxnDun xn1 AxnBun and its impulse response hn D n 0 CAn1B n 0 The transfer function is the z transform of the impulse response. Yt μt γt εt t 1 T.
Y C X D U. HttpgooglviSNG State-space model and recursive Bayesian filter 6 Posterior density of the state px 1K y 1Kβw Py 1K x 1Kβpx 1K w Py 1K βw Posterior Likelihood Prior State model Evidence βwparameters MAP estimate. Where X and X are the state vector and the differential state vector respectively.
Predicting the position of a system j steps into the future. U u y Cx D x Ax B 1 This represents the basic state-space equation where x a vector of the first-order state variables y the output vector x. The state-space representation was introduced in the Introduction.
This model is a workhorse that carries a powerful theory of prediction. Notice that ζt and εs independent for all ts and independent from α1. 1 2 where is an n by 1 vector representing the systems state variables is a scalar representing the input and is a scalar representing the output.
Basic system model using the State-Space block. STAT 520 State Space Models and Kalman Filter 7 Example. Goes through in real time the solution of questions on creation of state space models from ODEs and transfer functions.
State-space models aka dynamic linear models DLM 2. Y t μ t γ t ε t t 1 T 11 where μt. A time series is a set of observations y1 yn y 1 y n ordered in time that may be expressed in additive form.
Create a state-space model output from your MathScript Node and use this as the input to the CD Pole-Zero Map VI. Define State-space Model A 0 1 -1 -3 B 1 0 C 1 0 D 2 ssmodel controlssA B C D H controlss2tfssmodel printH Step response for the system t y controlstep_responseH pltplott y plttitleStep Response H pltxlabelt pltylabely pltgrid pltshow 0 0 1 1 3 0 1 0 1 0 0 2 State-space Model. State-Space Models Overview 1.
This introduction gives information on deriving a state space model from linear or no. For a SISO LTI system the state-space form is given below. The state space model of Linear Time-Invariant LTI system can be represented as X A X B U.
A representation thof the dynamics of an N order system as a first order differential equation in an N-vector which is called the state. 1 An Intuitive Example of a State Space Model. In the absence of these equations a model of a desired order or number of states can be.
Create analyze and use state-space representations for control design. State space models 3. Linear State-Space Model Transfer Function Recall the linear state-space model.
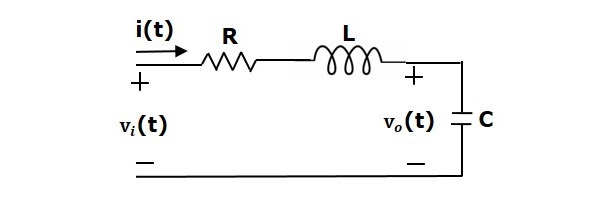
The state-space description of a system has a standard form the system equations and the output equations. For this example the state equations are i Lt1Lv Ct v Ct1Ci. Then y t 1 0x t x t 1 2 1 0 x t 1 w t Now in state space form We can use Kalman filter to compute likelihood and forecasts.
ARMA11 A state space representation of an ARMA11 model is given by Yt φ 1 0 0 Yt1 1 θ at where Y1 t zt and Y 2 t θat. This can be put into state space form in the following way. ϕ 1 ϕ 2 σ 2.
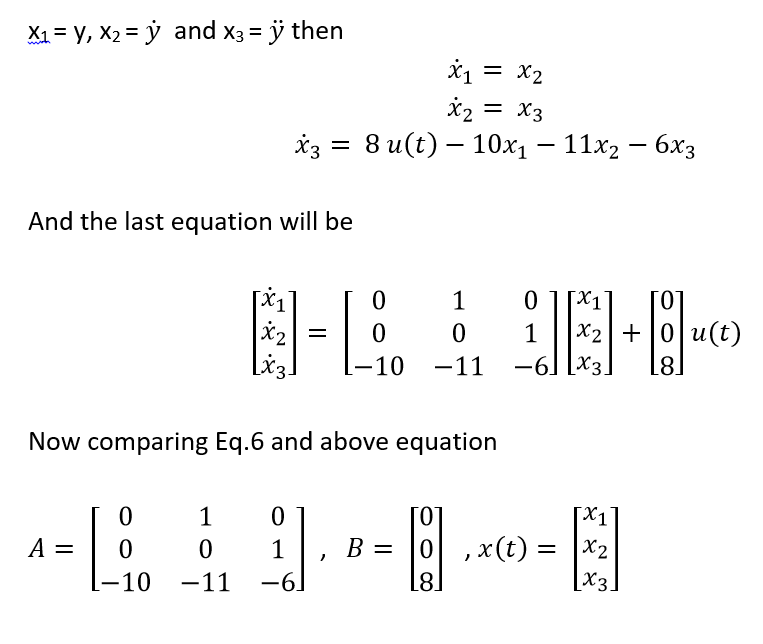
In this chapter let us discuss how to obtain transfer function from the state space model. Statas sspace makes it easy to fit a wide variety of multivariate time-series models by casting them as linear state-space models including vector autoregressive moving-average VARMA models structural time-series STS models and dynamic-factor models. The first and the second equations are known as state equation and output equation respectively.
State-space models Linear ltering The observed data fX tgis the output of a linear lter driven by white noise X. Yt Ztαt εt εt NID0Gt Initial state distribution α1 Na1P1. It describes a system with a set of first-order differential or difference equations using inputs outputs and state variables.
State space models are a matrix form for linear time-invariant systems. An AR1 model FollowingHamilton1994b 373374 we can write the first-order autoregressive AR1 model y t y t 1 t as a state-space model with the observation equation y t u t and the state equation u t u t 1 t where the unobserved state is u t y t. State-space models parameterize the observed dependent variables as functions of unobserved.
The equation inside the State-Space block is. Hz X n0 hnzn D X n1 CAn1B zn Dz1C X n0 z1A n B. ARIMA and RegARMA models and dlm 5.
Y t 1 0 α t α t 1 ϕ 1 ϕ 2 1 0 α t 1 0 η t. At this point the model is very general and an equation of any order can be set up for solution in the block parameters. 1 The local level model.
State-Space Modelling by Kevin Kotzé. The linear state space system is a generalization of the scalar AR 1 process we studied before. We know the state space model of a Linear Time-Invariant LTI system is - dotXAXBU YCXDU Apply Laplace Transform on both sides of the state equation.
Second order mass-spring system. Representing dynamics of higher-order linear systems. For the rest of this tutorial we will be using the symbol theta unless otherwise specified.
State Space Model Linear Gaussian state space model is defined in three parts. αt1 Ttαt Rtζt ζt NID0Qt Observation equation.
Control Systems State Space Model

State Space 11 Tutorial And Worked Examples Youtube
State Space Representations Of Linear Physical Systems
Control System State Space Model Javatpoint
Introduction To State Space Models Youtube

State Space Representations Of Linear Physical Systems

State Space Analysis Of Control System Electrical4u
Intro To Control 6 1 State Space Model Basics Youtube
0 comments
Post a Comment